-
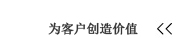
- 产品名称:机电一体化综合实训考核系统
- 产品型号:QY-JDYT42
- 产品价格:

机电一体化综合实训考核系统
文章来源:
机电一体化综合实训考核系统是一套模拟真实工业生产环境的教学装置,包含创新模块化自动生产线、模块化柔性自动生产线和智能制造柔性生产线等实训设备。该系统通过灵活的模块化配置和前沿的智能制造技术,致力于培养学生的专业能力、实践操作技巧和创新思维,以适应未来工业自动化和智能化的发展趋势。这套系统是现代工业生产培训的绝佳选择,为学生未来的职业发展奠定坚实基础。
二、系统组成
序号 | 项目名称 | 规格型号 | 单位 | 数量 |
1 | 颗粒上料单元 | 主要由挂板控制板、上料输送皮带、主输送模块、循环选料模块(数量为2个)、上料填装模块组成 | 套 | 1 |
2 | 加盖拧盖单元 | 主要由挂板控制板、输送模块、加盖模块、拧盖模块组成 | 套 | 1 |
3 | 检测分拣单元 | 主要由挂板控制板、主输送模块、龙门检测模块、辅输送带组件、分拣机构组成 | 套 | 1 |
4 | 6轴机器人单元 | 主要由挂板控制板、升降台A模块、升降台B模块、ABB六轴机器人及控制器、ABB机器人支持profinet通讯组成 | 套 | 1 |
5 | 成品入仓单元 | 主要由挂板控制板、堆垛机模块、成品仓库模块、实训桌组成 | 套 | 1 |
6 | 电源盒模块、配套工作站 | 具有6个单元交流电源提供,其中有1路为3相5线电源,5路为单相3线电源;包含1台触摸屏组件。 | 套 | 1 |
7 | 产品配件包 | 包含培训资源包和仿真软件包 | 套 | 1 |
三、配置及参数
颗料上料单元技术参数
(一)循环颗粒上料机构
1.功能:通过变频器控制输送带传动,供料机构将料筒中的物料推出,当传感器检测到第一皮带输送末端输送至第二皮带输送前端的物料是目标颜色物料时,控制器控制电机反转,目标颜色物料被第二皮带逆向输送至选料槽;当传感器检测到第一皮带输送末端输送至第二皮带输送前端的物料不是目标颜色物料时,电机继续正转,物料继续在循环输送皮带组上循环输送。
2.尺寸:约388mm*180mm*412mm
3.三相交流减速电机
(1) 型号:31K15GN-S/3GN25K
(2) 电压:三相AC220V
(3) 功率:15W,减速比值25
4.高精度数字光纤传感器
(1) 型号:FM-E31
(2) 电源电压:12V至24VDC±10%
(3) 控制输出:NPN型
(4) 保护电路:电源具有逆电极保护、输出具有过流保护、过电压保护功能
(5)输出功能:LIGHT-ON/DARK-ON(开关选择)
(6)延时功能:断开延时计时器/开启延时计时器/单次计时器
(7)响应时间:50μs(HIGH SPEED)/250μs(FINF)1ms(SUOER)/16ms(MEGA)
5.光纤头
(1)型号:FN-D119
(2)检测距离:20至190mm
(3)最小弯曲半径:R20
6.传送皮带
(1)材质:PVC黑色平面
(2)厚度:2.0mm
(3)尺寸:840*26mm、1006*24mm
7.同步带:345HTD3M100 黑色
8.推料气缸:PB6*30,缸径:6mm,行程:30mm
9.配套单电控电磁阀、磁性开关、电磁阀及气动接头
10. 15端子板组件:SX-TBD-001
(1)PCB板尺寸:L55*72mm
(2)端口数量:15路并带有工作状态指示
(3)控制方式:NPN/PNP可选
(4)接线方式:采用弹片式接线端子与DB37针接口。
11.物料颗粒工件1:材质:白色POM、尺寸:φ18*13mm。
12. 物料颗粒工件2:材质:蓝色POM、尺寸:φ18*13mm。
(二)上料填装机构
1. 功能:空瓶子与目标颜色物料到位后,上料填装机构吸盘旋转至目标物料正上方,然后下降吸取目标物料,旋转至空瓶子正上方,将目标物料放入空瓶子内。
2.尺寸:约235mm*W277mm*H230mm。
3.安装底板:铝材加工成型,表面阳极氧化处理。
4.旋转气缸:HRQ10,回转角度范围:0~190°,重复精度:0.2°,动作方式:复动式。
5.双轴升降气缸:TR10*90,缸径φ10,行程90mm。
6.真空吸盘:PAFS-10*10,吸盘材质:丁腈橡胶材质(黑色),支架型式:直立弹簧式,吸盘外径尺寸:φ10,弹簧压缩长度:10mm。
7.配套单电控电磁阀、磁性开关、电磁阀及气动接头等。
8.真空发生器:X-KZU05S,喷嘴直径:φ0.5mm,最高真空度:-85KPa。
9.15端子板组件:SX-TBD-001,PCB板尺寸:L55*72mm,端口数量:15路并带有工作状态指示,控制方式:NPN/PNP可选,接线方式:采用弹片式接线端子与DB37针接口。
◆ 加盖拧盖单元技术参数
(一)加盖拧盖单元
1.加盖机构
(1)功能:加盖定位机构将瓶子固定,推盖气缸将瓶盖推出的同时,压盖气缸将盖子(白色或蓝色)压装到瓶子上,完成瓶盖的装配。
(2)尺寸:约140mm*W310mm*H505mm。
(3) 圆柱型光电传感器:UE-11D,控制输出:NPN型,检测范围:11cm,反应时间:最迟1.5ms,电源电压:12V至24VDC±10%。
(4) 推盖气缸:TR10*60,缸径φ10,行程60mm。
(5)压盖气缸:PB10*80,缸径φ10,行程80mm。
(6) 配套单电控电磁阀、磁性开关、电磁阀及气动接头等。
(7)5端子板组件:SX-TBD-001,PCB板尺寸:L55*72mm,端口数量:15路并带有工作状态指示,控制方式:NPN/PNP可选,接线方式:采用弹片式接线端子与DB37针接口。
2.拧盖机构
(1)功能:拧盖定位机构将瓶子固定后,拧盖电机启动旋转,拧盖机构缓慢下,拧盖芯与瓶盖接触,依据摩擦力带动瓶盖旋转,直至瓶盖拧紧。
(2)尺寸:约152mm*W205mm*H490mm。
(3)主材料:铝材加工成型,表面阳极氧化处理。
(4)拧盖装置导杆材料:45#镀硬铬。
(5)拧盖电机:ZGX45RGG,额定电压:24VDC,额定功率:8W,额定转速:66Rr/min,极数:2极,转矩:1.316N.m。
(6)拧盖升降气缸:TR10*30,缸径φ10,行程30mm。
(7)电机罩防护罩:采用1.2mm冷轧钢板折弯成型,表面静电喷塑,尺寸:L107mm*W186mm*H158mm。
(8) 15端子板组件:SX-TBD-001,PCB板尺寸:L55*72mm,端口数量:15路并带有工作状态指示,控制方式:NPN/PNP可选,接线方式:采用弹片式接线端子与DB37针接口。
(9)配套单电控电磁阀、磁性开关及气动接头等。
检测分拣单元技术参数
(一)拧盖检测机构
1.功能:通过回归反射传感器检测瓶盖是否拧紧;
2.传感器支架:尺寸约L40mm*W30mm*H120mm。
3.材料:铝材加工成型,表面阳极氧化处理。
4.回归反射型传感器:E3ZG-R61,电源电压:12V至24VDC±10%,距离:0.1-4m,控制输出:NPN型。
5.反射板:E39-R1S,尺寸:L60mm*40mm*7.5mm,指向角:30°以上。
(二)龙门检测机构
1.功能:检测瓶子内部颗粒是否符合要求,(根据自已需要检测的颗粒对传感器进行调节),对拧盖与颗粒均合格的瓶子进行瓶盖颜色判别。
2.尺寸:L183mm*W71mm*H215mm。
3.龙门机构:龙门主体采用茶褐色半透明有机玻璃加工粘合而成,龙门外壳采用采用1.2mm冷轧钢板折弯成型,表面静电喷塑处理。
4.高精度数字光纤传感器:型号:FM-E31
5.光纤头1:FN-D119,检测距离:20至190mm,最小弯曲半径:R20。
6.光纤头2:FN-T064,检测距离:220至1800mm,最小弯曲半径:R25。
7.七彩灯带:5050RGB60W,检测距离:额定电压:24VDC,颜色种类:红/绿/蓝。
(三)不合格品分拣机构
1.功能:拧盖或颗粒不合格的瓶子通过分拣机构推送到废品皮带上(辅皮带);
2.尺寸:L151mm*W53mm*H57mm。
3.材料:铝材加工成型,表面阳极氧化处理。
4.分拣气缸:TR10*60,缸径φ10,行程60mm。
5.配套单电控电磁阀、磁性开关及气动接头等。
工业6轴机器人单元技术参数
(一)工业6轴机器人本体
1.型号:IRB 120-3/0.6 ,
2.有效荷重3 kg,工作范围580 mm
3.特性:
(1)集成信号源手腕设10路信号
(2)集成气源手腕设4路空气(5 bar)
(3)重复定位精度0.01mm
(4)机器人安装任意角度
(5)防护等级:IP30
(6)控制器IRC5紧凑型
4.运动
轴运动工作范围最大速度:
轴1旋转+165°~ -165° 250°/s
轴2手臂+110°~ -110° 250°/s
轴3手臂+70° ~ -90° 250°/s
轴4手腕+160°~ -160° 320°/s
轴5弯曲+120°~ -120° 320°/s
轴6翻转+400°~ -400° 420°/s
5.性能:
(1)1 kg拾料节拍: 25×300×25 mm 0.58 s
(2)TCP最大速度6.2 m/s
(3)TCP最大加速度28 m/s2
(4)加速时间0-1 m/s 0.07 s
6.电气连接
电源电压200-600 V,50/60 Hz
7. 额定功率
变压器额定功率:3.0 kVA
功耗:0.25 kW
8.物理特性
(1)机器人底座尺寸:180×180 mm
(2)机器人高度:700 mm
(3)重量:25 kg
9.环境
机械手环境温度:
运行中+5°C(41°F)至 +45°C(122°F)
运输与储存时-25°C(-13°F)至 +55°C(131°F)
短期最高+70°C(158°F)
相对湿度最高95%
选件洁净室ISO 5级
10.(IPA认证)
(1)噪音水平最高70 dB (A)
(2)安全性安全停、紧急停
(3)通道安全回路监测
(4)3位启动装置
(二)机器人控制器
IRC5紧凑型控制器,含7米连接电缆
1.控制器硬件:多处理器系统,PCI总线,大容量闪存盘,电备用电源,U盘接口;
2.输入输出:标准16in/16out;
3.串行通道:RS232;
4.可就机器人使用寿命内,使用机器人离线软件进行实时程序,IO,机器人3D 动态动作监控;
5.远程机器人系统备份与恢复功能;
6.自动工具重量与载荷检测设定功能;
7.在示教器实现人机互动界面的开发,并提供基于VB 和C#的二次开发功能;
8.机器人全寿命保养自动维护检测系统功能;
9.机器人运动轨迹实时微调功能;
10.自带IO 自定义可编程按钮;
11.3D 实时舒适摇杆手动操作系统;
12.电池电量环保节省功能;
13.终身机器人系统功能升级(高级用户);
14.支持RAPID 编程语言规范,并直接解释执行。
15.支持ROBOTAPPS的开发。
16.机器人控制系统软件必须基于WINCE平台,以便基于机器人的二次开发。
17.机器人控制系统原配固态存储器容量不得低于1G,并支持USB 扩展为副存储器。
(三)示教器
Flexpendant示教,带10米电缆,彩色触摸屏,一个操纵杆,一个紧急停止按钮,对质左/右手切换,支持U盘。
成品入仓单元技术参数
(一)标签工作台
1.功能:4行6列标签放置区,可同时放置24个标签。
2.尺寸:L150mm*W110mm*H206mm。
3.主材料:铝材加工成型组装而成,表面阳极氧化处理。
(二)盒底升降机构
1.功能:将包装盒底通过升降机构,提升到最佳位置,然且推向物料台上。
2.尺寸:L374mm*W200mm*H280mm。
3.防护板:采用1.5mm冷轧钢板折弯成型,表面静电喷塑处理。
4.步进电机:YK42XQ47-02A,额定电压:3V ,额定电流:2A,步角距:1.8°,电机长度:49mm,保持转矩:0.48N.m,电机线数:4线,步距精度:5% 绝缘电阻:100MΩ Min 500VD,C耐压:500VAC 1minute,径向跳动:最大0.02mm(450g负载),轴向跳动:最大0.08mm(450g负载)。
5.圆柱型光电传感器: UE-11D,控制输出:NPN型,检测范围:11cm,反应时间:最迟1.5ms,电源电压:12V至24VDC±10%。
6.微型光电传感器: EE-SX951, 电源电压:5V至24VDC±10%。检测范围:5mm,保护回路:负载短路保护。
7.推料双轴气缸:型号:TR16*150,缸径φ16,行程150mm。
8.配套单电控电磁阀、磁性开关及气动接头等。
9.15端子板组件:SX-TBD-001,PCB板尺寸:L55*72mm,端口数量:15路并带有工作状态指示,控制方式:NPN/PNP可选,接线方式:采用弹片式接线端子与DB37针接口。
10.升降机构:采用丝杆传动,包含左右侧板、前板、底板、顶板、直线轴承滑座、SFC镀铬直线光轴、304不锈钢螺纹丝杆、深沟球轴承、平行式弹性联轴器等组成。
(三)盒盖升降机构
1.功能:将包装盒盖通过升降机构,提升到最佳位置,等待工业机器人抓取。
2.尺寸:L227mm*W145mm*H280mm。
3.防护板:采用1.5mm冷轧钢板折弯成型,表面静电喷塑处理。
4.步进电机:YK42XQ47-02A,额定电压:3V ,额定电流:2A,步角距:1.8°,电机长度:49mm,保持转矩:0.48N.m,电机线数:4线,步距精度:5% 绝缘电阻:100MΩ Min 500VD,C耐压:500V AC 1minute,径向跳动:最大0.02mm(450g负载),轴向跳动:最大0.08mm(450g负载)。
5.微型光电传感器:EE-SX951, 电源电压:5V至24VDC±10%。检测范围:5mm,保护回路:负载短路保护。
6.推料双轴气缸:TR16*125,缸径:φ16,行程:125mm。
7.配套单电控电磁阀、磁性开关及气动接头等。
8、15端子板组件:SX-TBD-001,PCB板尺寸:L55*72mm,端口数量:15路并带有工作状态指示,控制方式:NPN/PNP可选,接线方式:采用弹片式接线端子与DB37针接口。
9.升降机构:采用丝杆传动,包含左右侧板、前板、底板、顶板、直线轴承滑座、SFC镀铬直线光轴、304不锈钢螺纹丝杆、深沟球轴承、平行式弹性联轴器等组成。
(四)包装定位装夹机构
1.功能:与盒底升降机构配合使用,用于防止盒底定位。
2.尺寸:L55mm*W187mm*H136mm。
3.材料:铝材加工成型,表面阳极氧化处理。
4.双轴气缸:TR10*30,缸径:φ10,行程:30mm。
5.配套单电控电磁阀、磁性开关及气动接头等。
(五)堆垛机构
1.功能:将物料台上的包装盒体吸取出来,然后按依次精准的放入仓库相应仓位,水平轴为一个精密转盘机构,垂直轴为高精度滚珠丝杆升降机构,由伺服电机进行高精度控制。
2.堆垛机构尺寸:L316mm*W312mm*H527mm。
3.伺服电机:
(1)型号:HG-KN13J-S1002
(2)额定输出:0.1kW
(3)额定转矩:0.32 Nom
(4)最大转矩:0.95 Nom
(5)额定转速:3000 r/min;
(6)最大转速:5000 r/min
(7)瞬时允许转速:5750 r/min
(8)连续额定转矩时的功率比:12.9 kW/s
(9)额定电流:0.8A
(10)最大电流:2.4A
(11)惯量J:0.0783 [* 10的4次方kgom平方];
(12)推荐负载惯量比:15倍以下
(13)速度o位置检测器:增量17位编码器(伺服电机每转的分辨率: 131072pulses/rev)
(14)振动等级: V10;
(15)轴的允许负载:L25mm、径向88N、轴向59N
(16)重量:0.57kg
4.电机电源电缆:长度3米。
5.伺服编码器电缆:长度3米。
6.精密电控旋转台:MRS102,台面直径:100mm,传动比:180:1,分辨率:0.0002°,重复定位精度:<0.005°,最大速度:25°/S。
7.微型光电传感器:EE-SX951,电源电压:5V至24VDC±10%。检测范围:5mm,保护回路:负载短路保护。
8.真空吸盘:ZPT16UN-A5,吸盘材质:丁腈橡胶材质(黑色),外螺纹直径:M5*0.8,吸盘外径尺寸:φ16。
9.双轴气缸:TR16*125,缸径:φ16,行程:125mm。
10.配套单电控电磁阀、磁性开关
11.及气动接头等。
12.升降总成机构:
(1)滚珠丝杠:L=310mm。
(2)导杆:L=320mm*φ16,材质:304不锈钢。
(3)直线轴承:LMK16UU(方法兰型)
(4)单膜片联轴器:JST4-26*25.5CS-08*10
13.15端子板组件:SX-TBD-001,PCB板尺寸:L55*72mm,端口数量:15路并带有工作状态指示,控制方式:NPN/PNP可选,接线方式:采用弹片式接线端子与DB37针接口。
(六)成品仓库
1.功能:仓库采用弧形排列设计,仓库设置2行3列仓位,每个仓位均安装一个检测传感器,三列仓位采用三种不同颜色进行区分,用于存储包装盒。
2.成品仓库尺寸:L553mm*W234mm*H300mm。
3.光电传感器:E3ZG-D61,开关类型:漫反射型,输出形式:直流三线6V-36VDC NPN型,检测距离:5-10cm。
4.仓位:红色、黄色、绿色三种。
5.立柱: L=278mm*φ12,材质:304不锈钢。
6.防护围板:采用1.2mm冷轧钢板折弯成型,表面静电喷塑处理。
(七)定位装夹机构
1.功能:将输送到位的瓶子进行固定。
2.机构尺寸:约L174mm*W92mm*H82mm,铝材加工成型,表面阳极氧化处理。
3.双轴定位气缸:TR10*20,缸径φ10,行程20mm。
4.配套磁性开关、电磁阀及配套气动接头等。
电源盒模块、配套工作站技术参数
(一)电源盒模块
1.功能:可同时满足5个单元设备的供电,预留备用电源1组,配置信号指示灯、快速连接接口。
2.电源输出电压:AC220V
3.尺寸:约L296mm*W226mm*H90mm。
4.安全保护:具有漏电保护、过流保护等用电安全保护功能,
5.电源盒合体:壳体采用1.2mm冷轧钢板折弯成型。
6.电源盒面板:采用2.0mm铝板加工而成,表面静电喷塑后UV打印。
(二)电气控制挂板
1.功能:电气控制挂板安装于模型桌体内部,采用可拆卸式斜面放置,按设备单元功能不同,挂板上会安装有H2U汇川工控器件、变频器、步进驱动器、伺服系统与低压电器元件。挂板上下两端安装有铝制拉手,方便挂板装卸。
2.挂板结构:挂板尺寸约L450mm*W600mm*H26mm,采用1.5mm冷轧钢板折弯成型,表面静电喷塑处理。
3.小型中间继电器:RXM4LB2BD DC24V
4.交流接触器:LC1-D12M7C AC220V
5.小型断路器:IC65N 2P C10A
6.熔断器座:RT28N-32
7.开关电源:+24V/6.5A
8.导轨插座:EA9X310 3孔10A
9.可编程控制器:汇川H2U-3624MR,继电器型 36点输入24点输出。(安装于颗料上料单元、检测分拣单元挂板上)。
10.可编程控制器:汇川H2U-1616MR,继电器型 16点输入16点输出。(安装于加盖拧盖单元挂板上)。
11.可编程控制器:汇川H2U-3232MT,晶体管型 32点输入32点输出。(安装于六轴机器人单元挂板上)。
12.可编程控制器:汇川H2U-2416MT,晶体管型 24点输入16点输出。(安装于成品入仓单元挂板上)。
13.变频器:FR-D720S-0.4K(安装于颗料上料单元挂板上)。
(1)电源输入类型:单相200V电源
(2)适用电机容量(kW):0.4
(3)额定容量(kVA):1.0
(4)额定电流(A):2.5
(5)过载额定电流:150% 60s, 200% 0.5s(反限时特性)
(6)电压:3相200V~240V
(7)额定输入交流电压o频率:单相20OV~240V 50Hz/60Hz
(8)交流电压容许波动范围:170~264V 50Hz/60Hz
(9)频率容许波动范围:±5%
(10)额定容量(kVA):1.5
14.两相数字式步进驱动器:YKD2305M (安装于六轴机器人单元挂板上)
(1)驱动电压:20-50VDV
(2)适配电流:<3A
(3)保护功能:具有过流、过压、欠压等保护
15.伺服驱动器:MR-JE-10A(安装于成品入仓单元挂板上)
(1)输出额定电压:三相AC170V
(2)输出额定电流:1.1A
(3)电源输入电压、频率:单相AC200V~240V,50Hz/60Hz
(4)输入额定电流:0.9A
(5)输入允许频率变动:+-5%以内
(6)接口用电源:DC24V+-10%(必要电流容量:0.3A)
(7)控制方式:正弦波PWM控制,电流控制方式
(8)动态制动器:内置
(9)通信功能:USB 连个人电脑等(MR Configurator2对应)
(10)编码器输出脉冲:对应(ABZ相脉冲)
(11)模拟量监视器:2ch
(三)操作控制板
1.功能:采用斜面组合结构设计,操作面板设计有"启动"、"停止"、"复位"等按钮和指示灯,并且带一个急停按钮,所有控制面板为模块化设计,可根据实训要求任意更换,主要由信号按键薄膜板、电源控制薄膜板、急停按钮、控制线路板、空白板、铭牌板等。
2.尺寸:585mm*150mm*112mm。
3.操作面板:采用厚度≥2mm铝板加工而成,铝板上贴PVC优质薄膜。
4.主体框架:采用20*20型材组装成型。
5.信号按键薄膜:L100*150mm,设计有"启动"、"停止"、"复位"、"单机"、"联机"按键。
6.电源控制薄膜:L100*150mm,设计有"开"、"关"按键及急停按钮。
7.组旋动释放式急停按钮:CE4T-10R-01 1常闭红色
8.组件信号按键线路板:PCB板尺寸L98*W105mm。
9.组件25T面板线路板:PCB板尺寸L75*W100mm。
10.组件电源控制线路板:PCB板尺寸L48*W105mm。
11.组件迭插端子板:PCB板尺寸L38*W105mm。
(四)触摸屏
1.液晶屏:7"TFT液晶屏,分辨率(800×480)
2.CPU主板 :ARM结构嵌入式低功耗CPU为核心,主频400MHz
3.触摸屏:四线电阻式
4.内存:64M SDRAM,HK/HS具备图形加速
5.存储设备64M NAND Flash,HK/HS软件支持大数据储存
6.接口:1×RS232,1×RS485,2×USB,1×LAN
7.安装方式 :嵌入式安装
8.电源:DC24V/30W
9.总体尺寸:226.5mm×163mm×36mm
找不到想找的产品?请点击产品导航页 |